
Modulære kartesiske robottesystemer
til tunge laster med meget høj hastighed og med lang slaglængde
IAI tilbyder kartesiske robotter som 2-6 akse-kombinationer med 230 V servomotor, som kan benyttes i hundreder af konfigurationer som enten standard- eller præcisionstyper. En lige så omfattende portefølje af omkostningseffektive Cartesian RoboCylinders er tilgængelige. Der er 396 mulige kombinationer, herunder valg af kabelkæde.
Matchende kartesiske robotsystemer
Kartesiske, ortogonale¹ robotsystemer kan tilpasses meget godt til de respektive anvendelsesbetingelser på grund af deres modularitet. De optager også mindre plads end leddrevne robotter, for eksempel fordi de kun har de funktioner, der faktisk er nødvendige.

¹Ortogonal:
Hvis to rette linjer ikke er parallelle, så vil de skære hinanden i et punkt. I dette punkt kan man måle vinklen mellem dem. Hvis vinklen mellem dem er 90⁰, så siger man, at de to linjer står vinkelret på hinanden, eller at de er ortogonale.
At to linjer er ortogonale er altså det samme som, at de står vinkelret på hinanden.

Komplette systemer - standard eller præcisionstype
De mest efterspurgte konfigurationer er 2- eller 3-aksede komplette systemer i standard- eller præcisionstype. Alle systemer er kompakte, meget stabile enheder med lav vægt og høj stivhed.
Hver enkelt leveres med de tilhørende forbindelsesdele og kabler og kan installeres straks i en produktionslinje. En bred vifte af konfigurationer sikrer, at alle brugeres specielle krav kan opfyldes.
Cartesian system med gevindspindel servo motor
Kombinerede akser med en gevindspindel servo motor giver fremragende transport. Servomotoren indbygget i skyderen bevæger skyderen langs den faste kugleskrue. Dette gør det muligt at transportere tunge laster med meget høj hastighed, selv med et langt slag.
Billig cartesian RoboCylinder
Den seneste kartesiske RoboCylinder er baseret på den nye generation af lineære systemer fra RCP6 aktuator-serien.
Ligesom dem har disse kartesianske robotter også batterikapslede absolutkodere i høj opløsning og har således de samme fordele:
● Eliminering af reference drev
● Home føler
● Ingen vedligeholdelse af batteri
● Let genstart efter et nødstop

Sammenlignet med forgængerserien har den nye generation af kartesiske robotter en 2,4 gange hurtigere maksimal hastighed i kombination med en PCON-controller. Se nedenfor i artiklen. Som et resultat kunne cyklustiderne reduceres betydeligt og produktiviteten øges mærkbart.
Gentagelsesnøjagtigheden af alle kartesiske robotsystemer er +/- 0.01 mm. Alle vertikalt anvendte akser kan også udstyres med en bremse, således at skyderen forhindres i at synke ned i tilfælde af afbrydelse af strømforsyningen.
Robot wrist-enhed til kartesiske robotter
med batteriløs absolut enkoder som standard
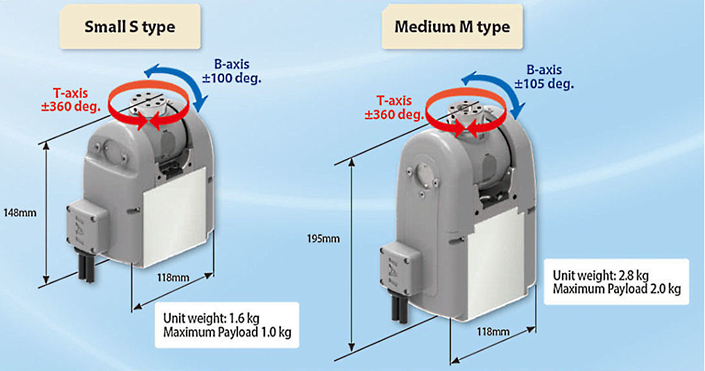
Med robot wrist-enheder får kartesiske-systemer for første gang den samme fleksibilitet og frihedsgrad som leddrevne robotter har. Men de er meget billigere og kræver meget mindre plads. Desuden gør IAI’s unikke design komponenterne lette og kompakte. Kan også bruges til et ortogonalt aksesystem med interpolationsfunktion.
Den innovative wrist-enhed har to samlinger: Vippeled til drejning har en arbejdscirkel på ± 100⁰, mens drejeledet kan drejes omkring ± 360⁰. De to impulsmotorer fremskynder disse cylindre med hastigheder på mellem 750⁰/Sek. og 1.200⁰/Sek.
Diagonale tilgange og en spids svingning kan nu udføres med minimum krav til aksekonfiguration, som ellers hidtil har krævet en lodret leddelt robot. Image-baserede kodelæsere og data.
Enhederne leveres som WU-S small type og WU-M mediumtype
Overblik med få fakta om kartesiske robotter
Kombinationer med 2 akser




IK2-P6XB XYB
Y-akse grundtype
Max. 16 kg
Max. X: 1.100 mm
Max. Y: 250 mm
24 V step motor
IK2-P6XB XYB
Y-akse grundtype
Max. 17 kg
Max. X: 1.100 mm
Max. Y: 500 mm
24 V step motor
IK2-P6 YZB
Z-akse grundtype
Max. 9 kg
Max. Y: 1.100 mm
Max. Z: 300 mm
24 V step motor
IK2-SXB
Y-akse grundtype
Max. 24 kg
Max. X: 1.000 mm
Max. Y: 400 mm
24 V step motor
Kombinationer med 3 akser




IK3-P6BB XYB+Z
Z-akse grundtype
Max. 4 kg
Max. X: 1.100 mm
Max. Y: 250 mm
Max. Z: 200 mm
24 V step motor
IK3-P6BB XYB+Z
Z-akse grundtype
Max. 4 kg
Max. X: 1.100 mm
Max. Y: 500 mm
Max. Z: 300 mm
24 V step motor
IK3-SBB XYB+Z
Z-akse grundtype
Max. 4 kg
Max. X: 1.100 mm
Max. Y: 400 mm
Max. Z: 200 mm
230 V servo motor
ICS(P)B3-B XYB+ZB
Z-akse grundtype
Max. 36,4 kg
Max. X: 2.500 mm
Max. Y: 700 mm
Max. Z: 500 mm
230 V servo motor
Kombinationer med 4 akser



IK4-P6BBB XYB+ZR unit
Y-akse grundtype
Max. 3,5 kg
Max. X: 1.100 mm
Max. Y: 300 mm
Max. Z: 150 mm – R: 360°
24 V step motor
IK4-P6BBB XYB+ZR unit
Y-akse grundtype
Max. 3,5 kg
Max. X: 1.100 mm
Max. Y: 300 mm
Max. Z: 150 mm – R: 360°
24 V step motor
ICSPA4-B XMYB
Multi-slider grundtype
Max. 40 kg
Max. X: 2.200 mm
Max. Y: 700 mm
230 V servo-motor
Kombinationer med 6 akser
Wrist-enheder




ICSPA6-B3N1 XZMYB+ZB
Multi-slider grundtype
Max. 19 kg
Max. X: 2.250 mm
Max. Y: 700 mm
Max. Z: 500 mm
230 V servo-motor
ICSPA6-B3N1H XMYB+ZS
X akse-slider grundtype
Max. 13 kg
Max. X: 2.250 mm
Max. Y: 700 mm
Max. Z: 400 mm
230 V servo-motor
WU-S
Kompakt type
Last: max. 1 kg
T-akse: max. ± 360°
B-akse: max. ± 100°
Vægt: 1,6 kg
WU-M
Medium type
Last: max. 2 kg
T-akse: max. ± 360°
B-akse: max. ± 105°
Vægt: 2,8 kg
8 og 16 akse fleksible controllere
valgfrit med feltbusforbindelser
Programcontrollere til interpolationsbevægelse på op til 8 akser
IAI's MSEP Controller til 8-akser er en netværk controller, der sparer tid til installation og fortrådning. MCON controller er en 8-akset positions controller, der foruden aktuatorer er én enhed, der styrer pulsmotor, AC-servomotor og børsteløs DC-motor.
Afhængigt af kravene og anvendelsesområderne er der egnede controllere til alle aktuatorer og kartesiske systemer. Afhængig af funktionaliteten skelnes der mellem position og program controller.
Hastigheden og placeringen af hver enkelt akse styres af positions controller. Program controllere bruges til akser, der interpolerer med hinanden og de bruges til kartesiske eller SCARA-robotter.
Op til 255 programmer kan gemmes i de programmerbare controllere. Derfor er interpola-tionsbevægelse på op til 8 akser mulig.
Programcontrollerne fungerer autonomt og muliggør kommunikation med periferien via forskellige grænseflader. Der kræves ingen PLC til systemer med op til 196 digitale ind- og udgange.
Program controllere funktioner:
Høj controller-komfort takket være simpelt programmeringssprog.
Interpolering af drev til 2 til 8 akser til forskellige applikationer.

Modulært netværk 1 til 16-akset position controller
Det nye kompakte RCON-system er en højtydende controller med modulære enheder og nyttige udvidelsesmuligheder. Desuden sparer RCON-controlleren plads inde i styreskabet
I alt kan der tilsluttes op til 16 akser med 2 akser pr. modul. Pladsbehovet er kun 1/5 af de konventionelle kontroller og fylder derfor ikke meget i styreskabet.
Den konventionelle type kræver netværksindstillinger, der er installeret for at matche antallet af controllere.
RCON kan styre driverenheder på op til 16 akser med aktuatorer med en enkelt gateway, hvilket muliggør omkostningsreduk-tioner op til 60 % eller deromkring. Det anbefales især, når man bruger flere akser. Kommunikationstiden er 4 mS, også når der er 16 aktuatorer tilsluttet controlleren.

Forbindelse til alle populære field-bus netværk
For at forbinde elektriske akser til et feltbusnetværk, f.eks. ProfiNet, Profibus, EtherNet / IP, EtherCAT, CC-Link eller DeviceNet, er controllerne forbundet via en feltbus-gateway eller direkte via et feltbus-interface.

Relaterede produkter
IAI Robot teknik >
Cartesian XYZ Robotter >
SCARA Robotter >